























AGV(自動誘導型搬送車)/AMR(自律走行搬送ロボット)の今後について【第一弾】
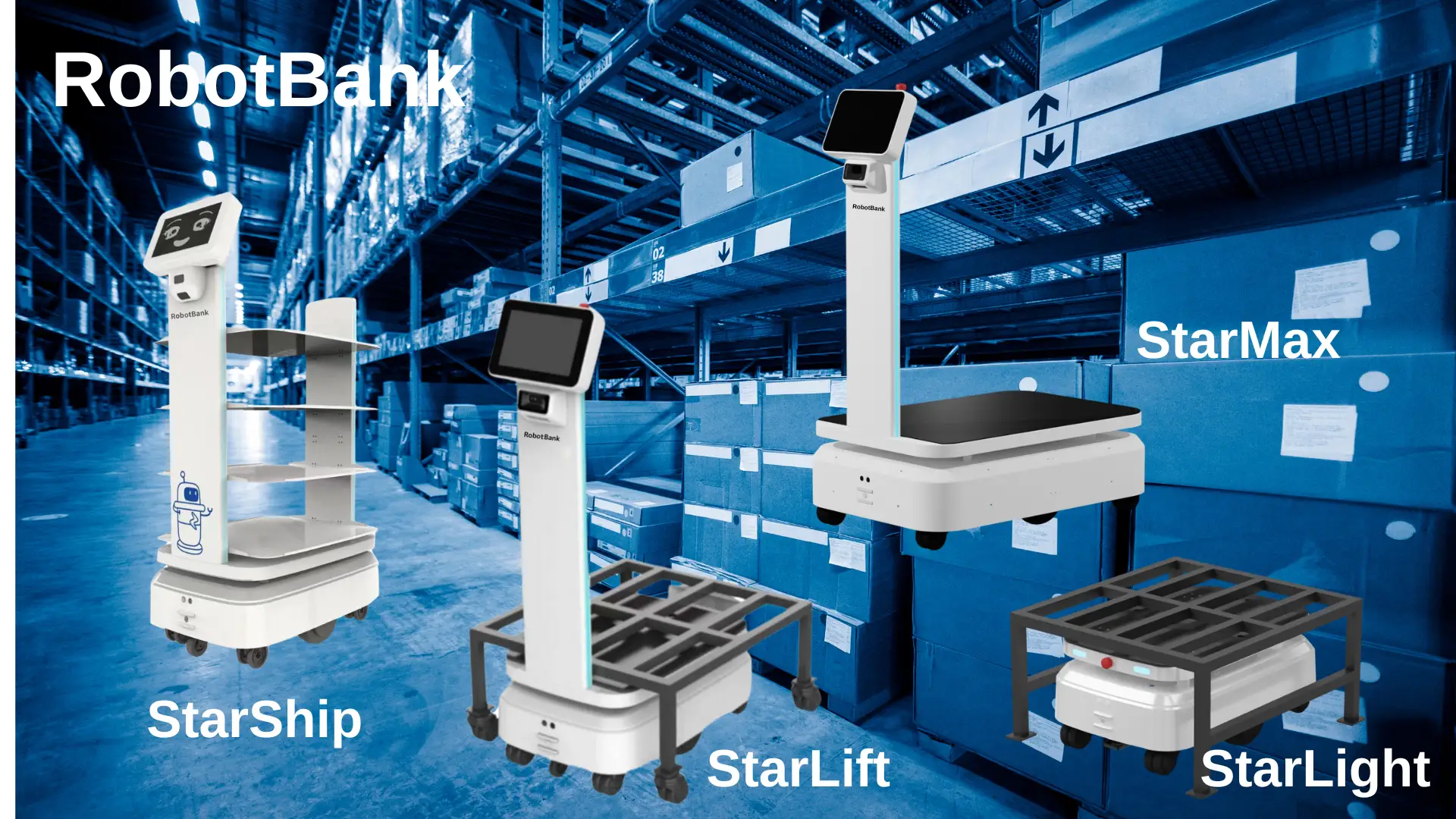
近年、様々な分野でAGV(無人搬送車)やAMR(自律走行搬送ロボット)の導入が広がっており、業務効率化や人件費削減に大きく貢献しています。
ロボット開発における技術革新は日進月歩です。今後、搬送ロボットはどのように発展していくのでしょうか。その可能性を探ってみましょう。
自律性の向上
AGVやAMRは、さらに高度な自律性を備えるようになると考えられます。ポイントはロボットに搭載されているセンサーやAIです。
搬送ロボットには一般的に以下のようなセンサーやAIが搭載されています。
- 距離センサー: 周囲の障害物を検出するためのセンサー(超音波、赤外線、レーザーなど)。これにより、安全なナビゲーションや障害物回避が可能になります。
- カメラ: 環境の視覚情報を提供し、搬送ロボットが物体や目的地を認識するのに役立ちます。また、画像処理技術や深層学習を組み合わせることで、高度な物体認識や環境理解を実現します。
- レーダー: 周囲の物体や障害物を検出します。天候や光の影響を受けにくいため、屋内外のさまざまな環境で有用です。
- 重量センサー: 一部の搬送ロボットでは、負荷の重さを検出するための重量センサーを搭載しています。これにより、負荷の適切な取り扱いや安全な移動が可能になります。
- SLAM(同時位置同定と地図作成): 搬送ロボットが自己位置を推定し、周囲の環境をマッピングするために使用されます。センサーデータとアルゴリズムを組み合わせて、リアルタイムで環境の理解を行います。
これらの組み合わせにより、搬送ロボットは高度な自律性を実現しています。個々の技術が進展することで、環境をより正確に認識し、障害物を回避する能力が向上することが予想されます。
柔軟性の向上
将来の搬送ロボットは、さまざまな環境や作業に適応できる柔軟性を持つようになるでしょう。例えば、可変高さの棚や複雑な倉庫環境に対応する能力が向上する可能性があります。
これは、上記の「自律性の向上」と同様に、センサーやAIの進展によってもたらされるものです。さらに、3次元センシング技術や、高度な動作計画アルゴリズムの進展も、柔軟性の向上に寄与します。
続きは第二弾へ








